





 AGV 智能設備銷售熱線:18858420002
AGV 智能設備銷售熱線:18858420002
 AGV小車 專業公司研發 咨詢熱線:18858420002
AGV小車 專業公司研發 咨詢熱線:18858420002
 無人搬運車 咨詢熱線:18858420002
無人搬運車 咨詢熱線:18858420002
 AGV廠家 智能團隊研發 熱線:18858420002
AGV廠家 智能團隊研發 熱線:18858420002
 智能運輸車 智能設備咨詢熱線:18858420002
智能運輸車 智能設備咨詢熱線:18858420002
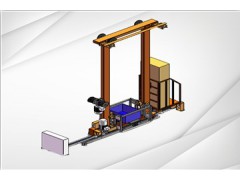
現場無線模塊將接駁臺,流利架的物料感應信號收集回中控系統,中控系統將信號分析,排序產生呼叫信息。系統自動將呼叫任務分發給agv小車。
小車接到任務將前往取料點(接駁臺),到達接駁臺后,AGV無線發送一個“到站”信號,接駁臺及agv小車同時啟動輸送帶/滾筒,實現自動上料,agv感應器感應到物料,中控系統停止滾筒轉動及皮帶轉動,完成接料功能。
接完料后,AGV前往卸料點(流利架),到達卸料點。AGV發“到站”信號給中控系統,中控系統控制AGV皮帶轉動,將物料輸送到流利架上,實現自動卸料功能。
店小二: 離線.
經營模式:
聯系時請說明浙商網,獲取更多實惠.
現場無線模塊將接駁臺,流利架的物料感應信號收集回中控系統,中控系統將信號分析,排序產生呼叫信息。系統自動將呼叫任務分發給agv小車。
小車接到任務將前往取料點(接駁臺),到達接駁臺后,AGV無線發送一個“到站”信號,接駁臺及agv小車同時啟動輸送帶/滾筒,實現自動上料,agv感應器感應到物料,中控系統停止滾筒轉動及皮帶轉動,完成接料功能。
接完料后,AGV前往卸料點(流利架),到達卸料點。AGV發“到站”信號給中控系統,中控系統控制AGV皮帶轉動,將物料輸送到流利架上,實現自動卸料功能。